Enable/Disable
Enable/Disable
Freigabemodi
Der AKD bietet mehrere Optionen für Hardware- und Software-Freigaben sowie eine sichere Drehmomentabschaltung (Safe Torque Off, STO) und deckt auf diese Weise verschiedenste Bedingungen ab.
Hardware-Freigabemodus:
Der AKD bietet zwei Methoden zur Hardware Freigabe. Die Auswahl der Methode erfolgt über DRV.HWENMODE. Modus 0 ermöglicht die Freigabe des Servoverstärkers und das Löschen von Fehlern an der steigenden Flanke des Eingangs für Hardware-Freigabe. Modus 1 führt NICHT zum Löschen von Fehlern an der steigenden Flanke des Eingangs für Hardware-Freigabe. Sie haben also die Möglichkeit, aktuelle Fehler zu prüfen und manuell zu löschen.
Vorgabe für Software-Freigabe
Zusätzlich existieren zwei Methoden zur Software-Freigabe des AKD. Diese werden über DRV.ENDEFAULT gesteuert. Der Vorgabemodus 0 belässt die Software beim Einschalten im deaktivierten Zustand. Der Vorgabemodus 1 bewirkt die Freigabe der Software beim Einschalten.
Deaktivierungsmodi
Benutzen Sie DRV.DISMODE zur Auswahl der Stopp Methode, wenn DRV.DIS (Software Disable) anliegt oder nach einem Feldbus Befehl.
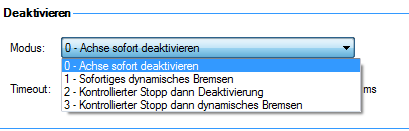
Modus 0: Sofortige Deaktivierung des Servoverstärkers.
In dieser Situation deaktiviert der Servoverstärker unverzüglich die Leistungsstufen.Der angetriebene Motor kommt entweder langsam zum Stillstand oder fällt bei einer vertikalen oder Wellenlastachse abrupt ab. Wenn eine Bremse vorhanden ist, wird diese gemäß der Einstellung von MOTOR.BRAKEIMM und MOTOR.TBRAKEAPP betätigt. Mit dem digitalen Eingangsmodus 13 können Sie einen kontrollierten Stopp durchführen, wie in Modus 2 beschrieben.
Modus 1: Dynamische Bremsung bis zum Stillstand.
In dieser Situation verwendet der Servoverstärker die Funktion für dynamisches Bremsen, um die Bewegung schnell zu stoppen, und deaktiviert anschließend die Leistungsstufe. In den meisten Fällen kommt der angetriebene Motor schnell zum Stillstand (je nach verfügbaren Joule und Lastbedingungen). Im Falle einer überhängenden oder vertikalen Last versucht der angetriebene Motor zu stoppen, lässt jedoch die Last weiterhin fallen, sofern keine Maßnahmen zu deren Sicherung getroffen wurden.
Modus 2: Kontrollierter Stopp und anschließende Deaktivierung.
In diesem Modus erfolgt ein kontrollierter Stopp auf Basis verschiedener, vom Benutzer eingestellter Parameter. Zunächst bremst der angetriebene Motor mit einer kontrollierten Rate (CS.DEC ), bis eines von zwei Ereignissen eintritt: 1) Der Motor erreicht den eingestellten Geschwindigkeits-Grenzwert (CS.VTHRESH ) über eine bestimmte Zeitdauer (CS.TO ), oder 2) Der Emergency-Timeout des Servoverstärkers wird erreicht (DRV.DISTO ). Tritt einer dieser beiden Fälle ein, wird die Leistungsstufe deaktiviert (und die Bremse betätigt, sofern vorhanden).
Modus 3: Kontrollierter Stopp, anschließend dynamische Bremsung.
Ähnlich wie in Modus 2 bremst der Motor mit einer kontrollierten Rate (CS.DEC), bis CS.VTHRESH über eine bestimmte Zeitdauer (CS.TO) erreicht wird. Die Servoverstärker führt daraufhin eine dynamische Bremsung durch und wird unter denselben Bedingungen wie in Modus 2 beschrieben deaktiviert.
Die Einstellung für Deaktivierungs-Timeout legt die Zeitdauer fest, über die der Servoverstärker dem Deaktivierungsmodus folgt, bevor er deaktiviert wird. Dies erfolgt unabhängig von der gewählten Methode und etwaigen Warnungen wegen eines Emergency-Timeout-Fehlers.
Die Ausführung sämtlicher Deaktivierungsmodi ist von der Art des empfangenen Deaktivierungsbefehls abhängig. Kritische Fehler, eine Hardware-Deaktivierung oder STO führen zum unverzüglichen Abschalten der Leistungsstufe, sodass der Motor je nach Sicherung langsam zum Stillstand kommt oder frei fällt.
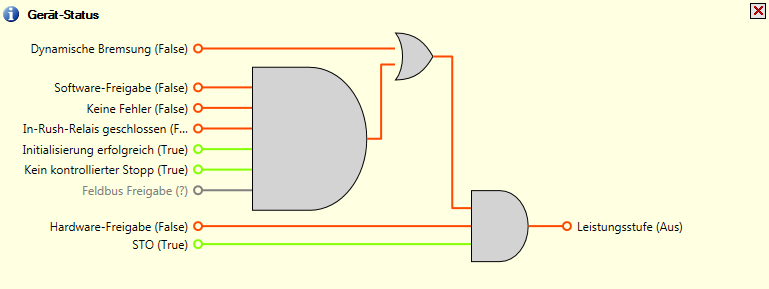
Gerätestatus
Der Gerätestatus Bereich wird angezeigt, wenn Sie auf die "Achse aktiv/Achse inaktic" Schaltfläche unten in WorkBench klicken:

Der Gerätestatus mit den Eingängen wird grafisch dargestellt. Aktivierte Ein- oder Ausgänge sind grün dargestellt, deaktivierte Ein- oder Ausgänge rot. Die Eingänge zu den Gattern ODER (OR) und UND (&) bestimmen, welche Bedingungen wahr (grün) oder falsch (rot) sind und folgen der normalen Logik für UND- und ODER-Gattern. Das Diagramm ist hilfreich bei der Suche nach einem Eingang, der möglicherweise eine Freigabe des Servoverstärkers verhindert.
Der in diesem Diagramm dargestellte Gesamtstatus zeigt die Werte der DRV.ACTIVE Parameter. Zusätzlich wird der Zustand der Eingänge (z.B. Software Enable, Hardware Enable) im Diagramm durch den Parameter DRV.DISSOURCES angezeigt.
Kontrollierter Stopp
Der Bereich für kontrollierten Stopp zeigt die Werte der mit dieser Funktion verknüpften Parameter an.
| Schaltfläche bzw. Dialogfenster | Beschreibung | Parameter |
|---|---|---|
|
Geschwindigkeits-Grenzwert |
Legt den Geschwindigkeits-Grenzwert für einen kontrollierten Stopp fest. |
CS.VTHRESH |
|
Timeout des Geschwindigkeits-Grenzwerts |
Legt die Zeitdauer fest, über welche die Antriebsgeschwindigkeit im Bereich von CS.VTHRESH liegen darf, bevor der Servoverstärker deaktiviert wird. |
CS.TO |
|
Verzögerung |
Legt den Bremswert für den kontrollierten Stoppvorgang fest. |
CS.DEC |
|
Eingang für kontrollierten Stopp |
Zeigt die Liste der für den kontrollierten Stoppmodus konfigurierten digitalen Eingänge an, mit einem Komma „,“ als Trennzeichen. Wenn keine Modus für kontrollierten Stopp konfiguriert ist, erscheint folgende Meldung in diesem Feld: Kein CS-Eingang konfiguriert. Der Link Eingang konfigurieren öffnet den Bildschirm „Digitale E/A“.Hier können Sie den Modus für kontrollierten Stopp konfigurieren. |
Mehr/Weniger-Schaltfläche
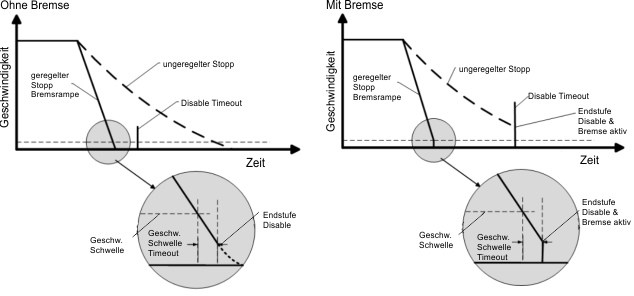
Die Mehr-Schaltfläche dient zur Anzeige des Statusdiagramms für die Konfiguration des kontrollierten Stopps. Sie zeigt außerdem das Blockschaltbild für den kontrollierten Stopp an. Es sind zwei Blockschaltbilder verfügbar: eines mit montierter Bremse und eines ohne Bremse.
Statusdiagramm für kontrollierten Stopp
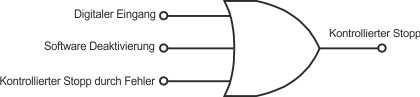
Blockschaltbild für kontrollierten Stopp